从0开发3D引擎(九):实现最小的3D程序-“绘制三角形”
Wonder-YYC 人气:4目录
- 上一篇博文
- 运行测试截图
- 需求分析
- 目标
- 特性
- 头脑风暴
- 确定需求
- 总体设计
- 具体实现
- 新建Engine3D项目
- 实现上下文
- 实现_init
- 实现“获得WebGL上下文”
- 实现“初始化所有Shader”
- 实现“初始化场景”
- 实现“设置清空颜色缓冲时的颜色值”
- 返回用于主循环的数据
- 实现_loop
- 实现“主循环”
- 实现“clearCanvas”
- 实现“_render”
- 最终的分层和领域模型
- 总结
- 本文完整代码地址
大家好,本文开始编程,实现最小的3D程序。
我们首先进行需求分析,确定功能点;
然后进行总体设计,划分模块,并且对模块进行顶层设计,给出类型签名和实现的伪代码;
最后进行具体实现,实现各个模块。
注:在Reason中,一个Reason文件(如Main.re)就是一个模块(Module)。
上一篇博文
从0开发3D引擎(八):准备“搭建引擎雏形”
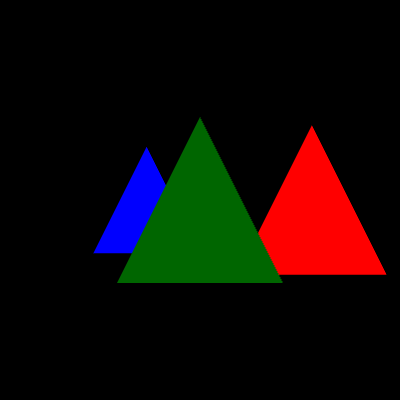
运行测试截图
测试场景包括三个三角形:
需求分析
首先,我们分析最小3D程序的目标和特性;
接着,根据特性,我们进行头脑风暴,识别出功能关键点和扩展点;
最后,根据功能关键点和扩展点,我们确定最小3D程序的功能点。
目标
可从最小3D程序中提炼出通用的、最简化的引擎雏形
特性
为了达成目标,最小3D程序应该具备以下的特性:
- 简单
最小3D程序应该很简单,便于我们分析和提炼。 - 具有3D程序的通用特性
为了使从中提炼出的引擎雏形可扩展,最小3D程序需要包含3D程序主要的流程和通用的模式
头脑风暴
现在,我们根据特性,进行头脑风暴,识别出最小3D程序的功能关键点和扩展点。
下面从两个方面来分析:
1、从功能上分析
最简单的功能就是没有任何交互,只是绘制模型;
而最简单的模型就是三角形;
识别功能关键点:
a)绘制三角形
b)只渲染,没有任何交互
2、从流程上分析
3D程序应该包含两个步骤:
1)初始化
进一步分解,识别出最明显的子步骤:
//“|>”是函数式编程中的管道操作。例如:“A |> B”表示先执行A,然后将其返回值传给B,再执行B
初始化 = 初始化Shader |> 初始化场景识别功能扩展点:
a)多组GLSL
因为在3D场景中,通常有各种渲染效果,如光照、雾、阴影等,每种渲染效果对应一个或多个Shader,而每个Shader对应一组GLSL,每组GLSL包含顶点GLSL和片段GLSL,所以最小3D程序需要支持多组GLSL。
2)主循环
进一步分解,识别出最明显的子步骤:
主循环 = 使用requestAnimationFrame循环执行每一帧
每一帧 = 清空画布 |> 渲染
渲染 = 设置WebGL状态 |> 设置相机 |> 绘制场景中所有的模型识别功能扩展点:
b)多个渲染模式
3D场景往往需要用不同的模式来渲染不同的模型,如用不同的模式来渲染所有透明的模型和渲染所有非透明的模型。
c)多个WebGL状态
每个渲染模式需要设置对应的多个WebGL状态。
d)多个相机
3D场景中通常有多个相机。在渲染时,设置其中一个相机作为当前相机。
e)多个模型
3D场景往往包含多个模型。
f)每个模型有不同的Transform
Transform包括位置、旋转和缩放
确定需求
现在,我们根据功能关键点和扩展点,确定最小3D程序的需求。
下面分析非功能性需求和功能性需求:
非功能性需求
最小3D程序不考虑非功能性需求
功能性需求
我们已经识别了以下的功能关键点:
a)绘制三角形
b)只渲染,没有任何交互
结合功能关键点,我们对功能扩展点进行一一分析和决定,得到最小3D程序要实现的功能点:
a)多组GLSL
为了简单,实现两组GLSL,它们只有细微的差别,从而可以用相似的代码来渲染使用不同GLSL的三角形,减少代码复杂度
b)多个渲染模式
为了简单,只有一个渲染模式:渲染所有非透明的模型
c)多个WebGL状态
我们设置常用的两个状态:开启深度测试、开启背面剔除。
d)多个相机
为了简单,只有一个相机
e)多个模型
绘制三个三角形
f)每个模型有不同的Transform
为了简单,每个三角形有不同的位置(它们的z值,即深度不一样,从而测试“开启深度测试”的效果),不考虑旋转和缩放
根据上面的分析,我们给出最小3D程序要实现的功能点:
- 只渲染,没有交互
- 有两组GLSL
- 场景有三个三角形
第一个三角形用第一组的GLSL;
第二个三角形用第二组的GLSL;
第三个三角形用第一组的GLSL; - 所有三角形都是非透明的
- 开启深度测试和背面剔除
- 只有一个固定的透视投影相机
- 三角形的位置不同,不设置旋转和缩放
总体设计
现在,我们对最小3D程序进行总体设计:
1、我们来看下最小3D程序的上下文:

程序的逻辑放在Main模块的main函数中;
index.html页面执行main函数;
在浏览器中运行index.html页面,绘制三角形场景。
2、我们用类型签名和伪代码,对main函数进行顶层设计:
//unit表示无返回类型,类似于C语言的void
type main = unit => unit;
let main = () => {
_init()
//开启主循环
|> _loop
//使用“ignore”来忽略_loop的返回值,从而使main函数的返回类型为unit
|> ignore;
};
/https://img.qb5200.com/download-x/data是用于主循环的数据
type _init = unit => data;
let _init = () => {
获得WebGL上下文
//因为有两组GLSL,所以有两个Shader
|> 初始化所有Shader
|> 初始化场景
};
type _loop = data => int;
//用“rec”关键字将_loop设为递归调用
let rec _loop = (data) =>
requestAnimationFrame((time:int) => {
//执行主循环的逻辑
_loopBody(data);
//递归调用_loop
_loop(data) |> ignore;
});
type _loopBody = data => unit;
let _loopBody = (data) => {
data
|> _clearCanvas
|> _render
};
type _render = data => unit;
let _render = (data) => {
设置WebGL状态
|> 绘制三个三角形
};具体实现
现在,我们具体实现最小3D程序,使其能够在浏览器中运行。
新建Engine3D项目
首先通过从0开发3D引擎(三):搭建开发环境,搭建Reason的开发环境;
然后新建空白的Engine3D文件夹,将Reason-Example项目的内容拷贝到该项目中,删除src/First.re文件;
在项目根目录下,依次执行“yarn install”,“yarn watch”,“yarn start”。
Engine3D项目结构为:
src/文件夹放置Reason代码;
lib/es6_global/文件夹放置编译后的js代码(使用es6 module模块规范)。
实现上下文
在src/中加入Main.re文件,定义一个空的main函数:
let main = () => {
console.log("main");
};重写index.html页面为:
<!DOCTYPE html>
<html lang="en">
<head>
<meta charset="utf-8" />
<title>Demo</title>
</head>
<body>
<canvas id="webgl" width="400" height="400">
Please use a browser that supports "canvas"
</canvas>
<script type="module">
import { main } from "./lib/es6_global/src/Main.js";
window.onload = () => {
main();
};
</script>
</body>
</html>index.html创建了一个canvas,并通过ES6 module引入了编译后的Main.js文件,执行main函数。
运行index.html页面
浏览器地址中输入 http://127.0.0.1:8080, 运行index.html页面。
打开浏览器控制台->Console,可以看到输出“main”。
实现_init
现在我们来实现main函数,它包括_init和_loop函数。
我们首先实现_init函数,它的总体设计为:
type _init = unit => data;
let _init = () => {
获得WebGL上下文
|> 初始化所有Shader
|> 初始化场景
};实现“获得WebGL上下文”
通过以下步骤来实现:
1、获得canvas dom
需要调用window.querySelector方法来获得它 ,因此需要写FFI。
在src/中加入DomExtend.re,该文件放置与Dom交互的FFI。
在其中定义FFI:
type htmlElement = {
.
"width": int,
"height": int,
};
type body;
type document = {. "body": body};
[@bs.send] external querySelector: (document, string) => htmlElement = "";在Main.re的_init函数中,通过canvas dom id来获得canvas:
let canvas = DomExtend.querySelector(DomExtend.document, "#webgl");2、从canvas中获得webgl1的上下文
需要调用canvas的getContext方法,因此需要写FFI。
在src/中增加Gl.re,该文件放置与webgl1 API相关的FFI。
在其中定义相关FFI:
type webgl1Context;
type contextConfigJsObj = {
.
"alpha": bool,
"depth": bool,
"stencil": bool,
"antialias": bool,
"premultipliedAlpha": bool,
"preserveDrawingBuffer": bool,
};
[@bs.send]
external getWebgl1Context:
('canvas, [@bs.as "webgl"] _, contextConfigJsObj) => webgl1Context =
"getContext";在Main.re的_init函数中,获得上下文,指定它的配置项:
let gl =
Gl.getWebgl1Context(
canvas,
{
"alpha": true,
"depth": true,
"stencil": false,
"antialias": true,
"premultipliedAlpha": true,
"preserveDrawingBuffer": false,
}: Gl.contextConfigJsObj,
);我们通过网上的资料,解释下配置项:
WebGL上下文属性:
alpha :布尔值,指示画布是否包含alpha缓冲区.
depth :布尔值,指示绘图缓冲区的深度缓冲区至少为16位.
stencil :布尔值,指示绘图缓冲区具有至少8位的模板缓冲区.
antialias :布尔值,指示是否执行抗锯齿.
premultipliedAlpha :布尔值,指示页面合成器将假定绘图缓冲区包含具有预乘alpha的颜色.
preserveDrawingBuffer :如果该值为true,则不会清除缓冲区,并且将保留其值,直到作者清除或覆盖.
failIfMajorPerformanceCaveat :布尔值,指示如果系统性能低下是否将创建上下文.
premultipliedAlpha需要设置为true,否则纹理无法进行 Texture Filtering(除非使用最近邻插值)。具体可以参考Premultiplied Alpha 到底是干嘛用的
这里忽略了“failIfMajorPerformanceCaveat“。
实现“初始化所有Shader”
一共有两个Shader,分别对应一组GLSL。
- 在src/中加入GLSL.re,定义两组GLSL
GLSL.re:
let vs1 = {|
precision mediump float;
attribute vec3 a_position;
uniform mat4 u_pMatrix;
uniform mat4 u_vMatrix;
uniform mat4 u_mMatrix;
void main() {
gl_Position = u_pMatrix * u_vMatrix * u_mMatrix * vec4(a_position, 1.0);
}
|};
let fs1 = {|
precision mediump float;
uniform vec3 u_color0;
void main(){
gl_FragColor = vec4(u_color0,1.0);
}
|};
let vs2 = {|
precision mediump float;
attribute vec3 a_position;
uniform mat4 u_pMatrix;
uniform mat4 u_vMatrix;
uniform mat4 u_mMatrix;
void main() {
gl_Position = u_pMatrix * u_vMatrix * u_mMatrix * vec4(a_position, 1.0);
}
|};
let fs2 = {|
precision mediump float;
uniform vec3 u_color0;
uniform vec3 u_color1;
void main(){
gl_FragColor = vec4(u_color0 * u_color1,1.0);
}
|};这两组GLSL类似,它们的顶点GLSL一样,都传入了model、view、projection矩阵和三角形的顶点坐标a_position;
它们的片段GLSL有细微的差别:第一个的片段GLSL只传入了一个颜色u_color0,第二个的片段GLSL传入了两个颜色u_color0、u_color1。
- 在Gl.re中定义FFI
Gl.re:
type program;
type shader;
[@bs.send.pipe: webgl1Context] external createProgram: program = "";
[@bs.send.pipe: webgl1Context] external linkProgram: program => unit = "";
[@bs.send.pipe: webgl1Context]
external shaderSource: (shader, string) => unit = "";
[@bs.send.pipe: webgl1Context] external compileShader: shader => unit = "";
[@bs.send.pipe: webgl1Context] external createShader: int => shader = "";
[@bs.get] external getVertexShader: webgl1Context => int = "VERTEX_SHADER";
[@bs.get] external getFragmentShader: webgl1Context => int = "FRAGMENT_SHADER";
[@bs.get] external getCompileStatus: webgl1Context => int = "COMPILE_STATUS";
[@bs.get] external getLinkStatus: webgl1Context => int = "LINK_STATUS";
[@bs.send.pipe: webgl1Context]
external getProgramParameter: (program, int) => bool = "";
[@bs.send.pipe: webgl1Context]
external getShaderInfoLog: shader => string = "";
[@bs.send.pipe: webgl1Context]
external getProgramInfoLog: program => string = "";
[@bs.send.pipe: webgl1Context]
external attachShader: (program, shader) => unit = "";
[@bs.send.pipe: webgl1Context]
external bindAttribLocation: (program, int, string) => unit = "";
[@bs.send.pipe: webgl1Context] external deleteShader: shader => unit = "";- 传入对应的GLSL,初始化两个shader,创建并获得两个program
因为"初始化Shader"是通用逻辑,因此在Main.re的_init函数中提出该函数。
Main.re的_init函数的相关代码如下:
//通过抛出异常来处理错误
let error = msg => Js.Exn.raiseError(msg) |> ignore;
let _compileShader = (gl, glslSource: string, shader) => {
Gl.shaderSource(shader, glslSource, gl);
Gl.compileShader(shader, gl);
Gl.getShaderParameter(shader, Gl.getCompileStatus(gl), gl) === false
? {
let message = Gl.getShaderInfoLog(shader, gl);
error(
{j|shader info log: $message
glsl source: $glslSource
|j},
);
}
: ();
shader;
};
let _linkProgram = (program, gl) => {
Gl.linkProgram(program, gl);
Gl.getProgramParameter(program, Gl.getLinkStatus(gl), gl) === false
? {
let message = Gl.getProgramInfoLog(program, gl);
error({j|link program error: $message|j});
}
: ();
};
let initShader = (vsSource: string, fsSource: string, gl, program) => {
let vs =
_compileShader(
gl,
vsSource,
Gl.createShader(Gl.getVertexShader(gl), gl),
);
let fs =
_compileShader(
gl,
fsSource,
Gl.createShader(Gl.getFragmentShader(gl), gl),
);
Gl.attachShader(program, vs, gl);
Gl.attachShader(program, fs, gl);
//需要确保attribute 0 enabled,具体原因可参考: http://stackoverflow.com/questions/20305231/webgl-warning-attribute-0-is-disabled-this-has-significant-performance-penalt?answertab=votes#tab-top
Gl.bindAttribLocation(program, 0, "a_position", gl);
_linkProgram(program, gl);
Gl.deleteShader(vs, gl);
Gl.deleteShader(fs, gl);
program;
};
let program1 =
gl |> Gl.createProgram |> initShader(GLSL.vs1, GLSL.fs1, gl);
let program2 =
gl |> Gl.createProgram |> initShader(GLSL.vs2, GLSL.fs2, gl);因为error和initShader函数属于辅助逻辑,所以我们进行重构,在src/中加入Utils.re,将其移到其中。
实现“初始化场景”
我们在后面实现“渲染”时,要使用drawElements来绘制三角形,因此在这里不仅需要创建三角形的vertices数据,还需要创建三角形的indices数据。
另外,我们决定使用VBO来保存三角形的顶点数据。
值得说明的是,我们使用“Geometry”这个概念来指代模型的Mesh结构,Geometry数据就是指三角形的顶点数据,包括vertices、indices等数据。
我们来细化“初始化场景”:
初始化场景 = 创建三个三角形的Geometry数据 |> 创建和初始化对应的VBO |> 设置相机的view matrix和projection matrix |> 设置清空颜色缓冲时的颜色值下面分别实现子逻辑:
- 创建三个三角形的Geometry数据
因为每个三角形的Geometry数据都一样,所以在Utils.re中增加通用的createTriangleGeometryData函数:
let createTriangleGeometryData = () => {
open Js.Typed_array;
let vertices =
Float32Array.make([|
0.,
0.5,
0.0,
(-0.5),
(-0.5),
0.0,
0.5,
(-0.5),
0.0,
|]);
let indices = Uint16Array.make([|0, 1, 2|]);
(vertices, indices);
};这里使用Reason提供的Js.Typed_array.Float32Array库来操作Float32Array。
在Main.re的_init函数中,创建三个三角形的Geometry数据:
let (vertices1, indices1) = Utils.createTriangleGeometryData();
let (vertices2, indices2) = Utils.createTriangleGeometryData();
let (vertices3, indices3) = Utils.createTriangleGeometryData();- 创建和初始化对应的VBO
在Gl.re中定义FFI:
type bufferTarget =
| ArrayBuffer
| ElementArrayBuffer;
type usage =
| Static;
[@bs.send.pipe: webgl1Context] external createBuffer: buffer = "";
[@bs.get]
external getArrayBuffer: webgl1Context => bufferTarget = "ARRAY_BUFFER";
[@bs.get]
external getElementArrayBuffer: webgl1Context => bufferTarget =
"ELEMENT_ARRAY_BUFFER";
[@bs.send.pipe: webgl1Context]
external bindBuffer: (bufferTarget, buffer) => unit = "";
[@bs.send.pipe: webgl1Context]
external bufferFloat32Data: (bufferTarget, Float32Array.t, usage) => unit =
"bufferData";
[@bs.send.pipe: webgl1Context]
external bufferUint16Data: (bufferTarget, Uint16Array.t, usage) => unit =
"bufferData";
[@bs.get] external getStaticDraw: webgl1Context => usage = "STATIC_DRAW";因为每个三角形“创建和初始化VBO”的逻辑都一样,所以在Utils.re中增加通用的initVertexBuffers函数:
let initVertexBuffers = ((vertices, indices), gl) => {
let vertexBuffer = Gl.createBuffer(gl);
Gl.bindBuffer(Gl.getArrayBuffer(gl), vertexBuffer, gl);
Gl.bufferFloat32Data(
Gl.getArrayBuffer(gl),
vertices,
Gl.getStaticDraw(gl),
gl,
);
let indexBuffer = Gl.createBuffer(gl);
Gl.bindBuffer(Gl.getElementArrayBuffer(gl), indexBuffer, gl);
Gl.bufferUint16Data(
Gl.getElementArrayBuffer(gl),
indices,
Gl.getStaticDraw(gl),
gl,
);
(vertexBuffer, indexBuffer);
};在Main.re的_init函数中,创建和初始化对应的VBO:
let (vertexBuffer1, indexBuffer1) =
Utils.initVertexBuffers((vertices1, indices1), gl);
let (vertexBuffer2, indexBuffer2) =
Utils.initVertexBuffers((vertices2, indices2), gl);
let (vertexBuffer3, indexBuffer3) =
Utils.initVertexBuffers((vertices3, indices3), gl);- 设置相机的view matrix和projection matrix
因为涉及到矩阵操作,并且该矩阵操作需要操作Vector,所以我们在src/中加入Matrix.re和Vector.re,增加对应的函数:
Matrix.re:
open Js.Typed_array;
let createIdentityMatrix = () =>
Js.Typed_array.Float32Array.make([|
1.,
0.,
0.,
0.,
0.,
1.,
0.,
0.,
0.,
0.,
1.,
0.,
0.,
0.,
0.,
1.,
|]);
let _getEpsilon = () => 0.000001;
let setLookAt =
(
(eyeX, eyeY, eyeZ) as eye,
(centerX, centerY, centerZ) as center,
(upX, upY, upZ) as up,
resultFloat32Arr,
) =>
Js.Math.abs_float(eyeX -. centerX) < _getEpsilon()
&& Js.Math.abs_float(eyeY -. centerY) < _getEpsilon()
&& Js.Math.abs_float(eyeZ -. centerZ) < _getEpsilon()
? resultFloat32Arr
: {
let (z1, z2, z3) as z = Vector.sub(eye, center) |> Vector.normalize;
let (x1, x2, x3) as x = Vector.cross(up, z) |> Vector.normalize;
let (y1, y2, y3) as y = Vector.cross(z, x) |> Vector.normalize;
Float32Array.unsafe_set(resultFloat32Arr, 0, x1);
Float32Array.unsafe_set(resultFloat32Arr, 1, y1);
Float32Array.unsafe_set(resultFloat32Arr, 2, z1);
Float32Array.unsafe_set(resultFloat32Arr, 3, 0.);
Float32Array.unsafe_set(resultFloat32Arr, 4, x2);
Float32Array.unsafe_set(resultFloat32Arr, 5, y2);
Float32Array.unsafe_set(resultFloat32Arr, 6, z2);
Float32Array.unsafe_set(resultFloat32Arr, 7, 0.);
Float32Array.unsafe_set(resultFloat32Arr, 8, x3);
Float32Array.unsafe_set(resultFloat32Arr, 9, y3);
Float32Array.unsafe_set(resultFloat32Arr, 10, z3);
Float32Array.unsafe_set(resultFloat32Arr, 11, 0.);
Float32Array.unsafe_set(resultFloat32Arr, 12, -. Vector.dot(x, eye));
Float32Array.unsafe_set(resultFloat32Arr, 13, -. Vector.dot(y, eye));
Float32Array.unsafe_set(resultFloat32Arr, 14, -. Vector.dot(z, eye));
Float32Array.unsafe_set(resultFloat32Arr, 15, 1.);
resultFloat32Arr;
};
let buildPerspective =
((fovy: float, aspect: float, near: float, far: float), resultFloat32Arr) => {
Js.Math.sin(Js.Math._PI *. fovy /. 180. /. 2.) === 0.
? Utils.error("frustum should not be null") : ();
let fovy = Js.Math._PI *. fovy /. 180. /. 2.;
let s = Js.Math.sin(fovy);
let rd = 1. /. (far -. near);
let ct = Js.Math.cos(fovy) /. s;
Float32Array.unsafe_set(resultFloat32Arr, 0, ct /. aspect);
Float32Array.unsafe_set(resultFloat32Arr, 1, 0.);
Float32Array.unsafe_set(resultFloat32Arr, 2, 0.);
Float32Array.unsafe_set(resultFloat32Arr, 3, 0.);
Float32Array.unsafe_set(resultFloat32Arr, 4, 0.);
Float32Array.unsafe_set(resultFloat32Arr, 5, ct);
Float32Array.unsafe_set(resultFloat32Arr, 6, 0.);
Float32Array.unsafe_set(resultFloat32Arr, 7, 0.);
Float32Array.unsafe_set(resultFloat32Arr, 8, 0.);
Float32Array.unsafe_set(resultFloat32Arr, 9, 0.);
Float32Array.unsafe_set(resultFloat32Arr, 10, -. (far +. near) *. rd);
Float32Array.unsafe_set(resultFloat32Arr, 11, -1.);
Float32Array.unsafe_set(resultFloat32Arr, 12, 0.);
Float32Array.unsafe_set(resultFloat32Arr, 13, 0.);
Float32Array.unsafe_set(resultFloat32Arr, 14, (-2.) *. far *. near *. rd);
Float32Array.unsafe_set(resultFloat32Arr, 15, 0.);
resultFloat32Arr;
};Vector.re:
let dot = ((x, y, z), (vx, vy, vz)) => x *. vx +. y *. vy +. z *. vz;
let sub = ((x1, y1, z1), (x2, y2, z2)) => (x1 -. x2, y1 -. y2, z1 -. z2);
let scale = (scalar, (x, y, z)) => (x *. scalar, y *. scalar, z *. scalar);
let cross = ((x1, y1, z1), (x2, y2, z2)) => (
y1 *. z2 -. y2 *. z1,
z1 *. x2 -. z2 *. x1,
x1 *. y2 -. x2 *. y1,
);
let normalize = ((x, y, z)) => {
let d = Js.Math.sqrt(x *. x +. y *. y +. z *. z);
d === 0. ? (0., 0., 0.) : (x /. d, y /. d, z /. d);
};在Main.re的_init函数中,设置固定相机的vMatrix和pMatrix:
let vMatrix =
Matrix.createIdentityMatrix()
|> Matrix.setLookAt((0., 0.0, 5.), (0., 0., (-100.)), (0., 1., 0.));
let pMatrix =
Matrix.createIdentityMatrix()
|> Matrix.buildPerspective((
30.,
(canvas##width |> Js.Int.toFloat)
/. (canvas##height |> Js.Int.toFloat),
1.,
100.,
));实现“设置清空颜色缓冲时的颜色值”
在Gl.re中定义FFI:
[@bs.send.pipe: webgl1Context]
external clearColor: (float, float, float, float) => unit = "";在Main.re的_init函数中,设置清空颜色缓冲时的颜色值为黑色:
Gl.clearColor(0., 0., 0., 1., gl);返回用于主循环的数据
在Main.re的_init函数中,将WebGL上下文、所有的program、所有的indices、所有的VBO、相机的view matrix和projection matrix返回,供主循环使用(只可读):
(
gl,
(program1, program2),
(indices1, indices2, indices3),
(vertexBuffer1, indexBuffer1),
(vertexBuffer2, indexBuffer2),
(vertexBuffer3, indexBuffer3),
(vMatrix, pMatrix),
);实现_loop
_init函数实现完毕,接下来实现_loop函数,它的总体设计为:
type _loop = data => int;
let rec _loop = (data) =>
requestAnimationFrame((time:int) => {
_loopBody(data);
_loop(data) |> ignore;
});实现“主循环”
需要调用window.requestAnimationFrame来开启主循环。
在DomExtend.re中定义FFI:
[@bs.val] external requestAnimationFrame: (float => unit) => int = "";然后定义空函数_loopBody,实现_loop的主循环,并通过编译检查:
let _loopBody = (data) => ();
let rec _loop = data =>
DomExtend.requestAnimationFrame((time: float) => {
_loopBody(data);
_loop(data) |> ignore;
});实现“clearCanvas”
接下来我们要实现_loopBody,它的总体设计为:
type _loopBody = data => unit;
let _loopBody = (data) => {
data
|> _clearCanvas
|> _render
};我们首先实现_clearCanvas函数,为此需要在Gl.re中定义FFI:
[@bs.send.pipe: webgl1Context] external clear: int => unit = "";
[@bs.get]
external getColorBufferBit: webgl1Context => int = "COLOR_BUFFER_BIT";
[@bs.get]
external getDepthBufferBit: webgl1Context => int = "DEPTH_BUFFER_BIT";然后在Main.re中实现_clearCanvas函数:
let _clearCanvas =
(
(
gl,
(program1, program2),
(indices1, indices2, indices3),
(vertexBuffer1, indexBuffer1),
(vertexBuffer2, indexBuffer2),
(vertexBuffer3, indexBuffer3),
(vMatrix, pMatrix),
) as data,
) => {
Gl.clear(Gl.getColorBufferBit(gl) lor Gl.getDepthBufferBit(gl), gl);
data;
};实现“_render”
_render的总体设计为:
type _render = data => unit;
let _render = (data) => {
设置WebGL状态
|> 绘制三个三角形
};下面分别实现:
设置WebGL状态
在Gl.re中定义FFI:
[@bs.get] external getDepthTest: webgl1Context => int = "DEPTH_TEST";
[@bs.send.pipe: webgl1Context] external enable: int => unit = "";
[@bs.get] external getCullFace: webgl1Context => int = "CULL_FACE";
[@bs.send.pipe: webgl1Context] external cullFace: int => unit = "";
[@bs.get] external getBack: webgl1Context => int = "BACK";在Main.re的_render函数中设置WebGL状态,开启深度测试和背面剔除:
Gl.enable(Gl.getDepthTest(gl), gl);
Gl.enable(Gl.getCullFace(gl), gl);
Gl.cullFace(Gl.getBack(gl), gl);绘制第一个三角形
在_render函数中需要绘制三个三角形。
我们来细化“绘制每个三角形”:
绘制每个三角形 = 使用对应的Program |> 传递三角形的顶点数据 |> 传递相机数据 |> 传递三角形的位置数据 |> 传递三角形的颜色数据 |> 绘制三角形下面先绘制第一个三角形,分别实现它的子逻辑:
- 使用对应的Program
在Gl.re中定义FFI:
[@bs.send.pipe: webgl1Context] external useProgram: program => unit = "";在Main.re的_render函数中使用program1:
Gl.useProgram(program1, gl);- 传递三角形的顶点数据
在Gl.re中定义FFI:
type attributeLocation = int;
[@bs.send.pipe: webgl1Context]
external getAttribLocation: (program, string) => attributeLocation = "";
[@bs.send.pipe: webgl1Context]
external vertexAttribPointer:
(attributeLocation, int, int, bool, int, int) => unit =
"";
[@bs.send.pipe: webgl1Context]
external enableVertexAttribArray: attributeLocation => unit = "";
[@bs.get] external getFloat: webgl1Context => int = "FLOAT";因为“传递顶点数据”是通用逻辑,所以在Utils.re中增加sendAttributeData函数:
首先判断program对应的GLSL中是否有vertices对应的attribute:a_position;
如果有,则开启vertices对应的VBO;否则,抛出错误信息。
相关代码如下:
let sendAttributeData = (vertexBuffer, program, gl) => {
let positionLocation = Gl.getAttribLocation(program, "a_position", gl);
positionLocation === (-1)
? error({j|Failed to get the storage location of a_position|j}) : ();
Gl.bindBuffer(Gl.getArrayBuffer(gl), vertexBuffer, gl);
Gl.vertexAttribPointer(
positionLocation,
3,
Gl.getFloat(gl),
false,
0,
0,
gl,
);
Gl.enableVertexAttribArray(positionLocation, gl);
};在Main.re的_render函数中调用sendAttributeData:
Utils.sendAttributeData(vertexBuffer1, program1, gl);- 传递相机数据
在Gl.re中定义FFI:
type uniformLocation;
[@bs.send.pipe: webgl1Context]
external uniformMatrix4fv: (uniformLocation, bool, Float32Array.t) => unit =
"";
[@bs.send.pipe: webgl1Context]
external getUniformLocation: (program, string) => Js.Null.t(uniformLocation) =
"";因为“传递相机数据”是通用逻辑,所以在Utils.re中增加sendCameraUniformData函数:
首先判断program对应的GLSL中是否有view matrix对应的uniform:u_vMatrix和projection matrix对应的uniform:u_pMatrix;
如果有,则传递对应的矩阵数据;否则,抛出错误信息。
相关代码如下:
//与error函数的不同是没有使用ignore来忽略返回值
let errorAndReturn = msg => Js.Exn.raiseError(msg);
let _unsafeGetUniformLocation = (program, name, gl) =>
switch (Gl.getUniformLocation(program, name, gl)) {
| pos when !Js.Null.test(pos) => Js.Null.getUnsafe(pos)
//这里需要有返回值
| _ => errorAndReturn({j|$name uniform not exist|j})
};
let sendCameraUniformData = ((vMatrix, pMatrix), program, gl) => {
let vMatrixLocation = _unsafeGetUniformLocation(program, "u_vMatrix", gl);
let pMatrixLocation = _unsafeGetUniformLocation(program, "u_pMatrix", gl);
Gl.uniformMatrix4fv(vMatrixLocation, false, vMatrix, gl);
Gl.uniformMatrix4fv(pMatrixLocation, false, pMatrix, gl);
};在Main.re的_render函数中调用sendCameraUniformData:
Utils.sendCameraUniformData((vMatrix, pMatrix), program1, gl);- “传递三角形的位置数据”以及“传递三角形的颜色数据”
在Gl.re中定义FFI:
[@bs.send.pipe: webgl1Context]
external uniform3f: (uniformLocation, float, float, float) => unit = "";因为这两个逻辑都是传递GLSL的uniform数据,所以放在一个函数中;又因为使用不同GLSL的三角形,传递的颜色数据不一样,所以需要在Utils.re中,增加sendModelUniformData1、sendModelUniformData2函数,分别对应第一组和第二组GLSL。第一个和第三个三角形使用sendModelUniformData1,第二个三角形使用sendModelUniformData2。
这两个函数都需要判断GLSL中是否有model matrix对应的uniform:u_mMatrix和颜色对应的uniform;
如果有,则传递对应的数据;否则,抛出错误信息。
相关代码如下:
let _sendColorData = ((r, g, b), gl, colorLocation) =>
Gl.uniform3f(colorLocation, r, g, b, gl);
let sendModelUniformData1 = ((mMatrix, color), program, gl) => {
let mMatrixLocation = _unsafeGetUniformLocation(program, "u_mMatrix", gl);
let colorLocation = _unsafeGetUniformLocation(program, "u_color0", gl);
Gl.uniformMatrix4fv(mMatrixLocation, false, mMatrix, gl);
_sendColorData(color, gl, colorLocation);
};
let sendModelUniformData2 = ((mMatrix, color1, color2), program, gl) => {
let mMatrixLocation = _unsafeGetUniformLocation(program, "u_mMatrix", gl);
let color1Location = _unsafeGetUniformLocation(program, "u_color0", gl);
let color2Location = _unsafeGetUniformLocation(program, "u_color1", gl);
Gl.uniformMatrix4fv(mMatrixLocation, false, mMatrix, gl);
_sendColorData(color1, gl, color1Location);
_sendColorData(color2, gl, color2Location);
};在Matrix.re中增加setTranslation函数:
let setTranslation = ((x, y, z), resultFloat32Arr) => {
Float32Array.unsafe_set(resultFloat32Arr, 12, x);
Float32Array.unsafe_set(resultFloat32Arr, 13, y);
Float32Array.unsafe_set(resultFloat32Arr, 14, z);
resultFloat32Arr;
};在Main.re的_render函数中调用sendModelUniformData1:
Utils.sendModelUniformData1(
(
Matrix.createIdentityMatrix() |> Matrix.setTranslation((0.75, 0., 0.)),
(1., 0., 0.),
),
program1,
gl,
);- 绘制三角形
在Gl.re中定义FFI:
[@bs.get] external getTriangles: webgl1Context => int = "TRIANGLES";
[@bs.get] external getUnsignedShort: webgl1Context => int = "UNSIGNED_SHORT";
[@bs.send.pipe: webgl1Context]
external drawElements: (int, int, int, int) => unit = "";在Main.re的_render函数中,绑定indices1对应的VBO,使用drawElements绘制第一个三角形:
Gl.bindBuffer(Gl.getElementArrayBuffer(gl), indexBuffer1, gl);
Gl.drawElements(
Gl.getTriangles(gl),
indices1 |> Js.Typed_array.Uint16Array.length,
Gl.getUnsignedShort(gl),
0,
gl,
);绘制第二个和第三个三角形
与绘制第一个三角形类似,在Main.re的_render函数中,使用对应的program,传递相同的相机数据,调用对应的Utils.sendModelUniformData1或sendModelUniformData2函数、绑定对应的VBO,来绘制第二个和第三个三角形。
Main.re的_render函数的相关代码如下:
//绘制第二个三角形
Gl.useProgram(program2, gl);
Utils.sendAttributeData(vertexBuffer2, program2, gl);
Utils.sendCameraUniformData((vMatrix, pMatrix), program2, gl);
Utils.sendModelUniformData2(
(
Matrix.createIdentityMatrix() |> Matrix.setTranslation(((-0.), 0., 0.5)),
(0., 0.8, 0.),
(0., 0.5, 0.),
),
program2,
gl,
);
Gl.bindBuffer(Gl.getElementArrayBuffer(gl), indexBuffer2, gl);
Gl.drawElements(
Gl.getTriangles(gl),
indices2 |> Js.Typed_array.Uint16Array.length,
Gl.getUnsignedShort(gl),
0,
gl,
);
//绘制第三个三角形
Gl.useProgram(program1, gl);
Utils.sendAttributeData(vertexBuffer3, program1, gl);
Utils.sendCameraUniformData((vMatrix, pMatrix), program1, gl);
Utils.sendModelUniformData1(
(
Matrix.createIdentityMatrix() |> Matrix.setTranslation(((-0.5), 0., (-2.))),
(0., 0., 1.),
),
program1,
gl,
);
Gl.bindBuffer(Gl.getElementArrayBuffer(gl), indexBuffer3, gl);
Gl.drawElements(
Gl.getTriangles(gl),
indices3 |> Js.Typed_array.Uint16Array.length,
Gl.getUnsignedShort(gl),
0,
gl,
);最终的分层和领域模型
如下图所示:

总结
本文通过需求分析、总体设计和具体实现,实现了最小的3D程序,绘制了三角形。
但是,还有很多不足之处:
1、场景逻辑和WebGL API的调用逻辑混杂在一起
2、存在重复代码,如Utils的sendModelUniformData1和sendModelUniformData2有重复的模式
3、需要进行优化,如只需要传递一次相机数据、“使用getShaderParameter来检查初始化Shader的正确性”降低了性能
4、_init传递给主循环的数据,作为函数的形参过于复杂
我们会在后面的文章中,解决这些问题。
本文完整代码地址
Book-Demo-Triangle Github Repo
加载全部内容