PyTorch ResNet
峡谷的小鱼 人气:0简述
GoogleNet 和 VGG 等网络证明了,更深度的网络可以抽象出表达能力更强的特征,进而获得更强的分类能力。在深度网络中,随之网络深度的增加,每层输出的特征图分辨率主要是高和宽越来越小,而深度逐渐增加。
深度的增加理论上能够提升网络的表达能力,但是对于优化来说就会产生梯度消失的问题。在深度网络中,反向传播时,梯度从输出端向数据端逐层传播,传播过程中,梯度的累乘使得近数据段接近0值,使得网络的训练失效。
为了解决梯度消失问题,可以在网络中加入BatchNorm,激活函数换成ReLU,一定程度缓解了梯度消失问题。
深度增加的另一个问题就是网络的退化(Degradation of deep network)问题。即,在现有网络的基础上,增加网络的深度,理论上,只有训练到最佳情况,新网络的性能应该不会低于浅层的网络。因为,只要将新增加的层学习成恒等映射(identity mapping)就可以。换句话说,浅网络的解空间是深的网络的解空间的子集。但是由于Degradation问题,更深的网络并不一定好于浅层网络。
Residual模块的想法就是认为的让网络实现这种恒等映射。如图,残差结构在两层卷积的基础上,并行添加了一个分支,将输入直接加到最后的ReLU激活函数之前,如果两层卷积改变大量输入的分辨率和通道数,为了能够相加,可以在添加的分支上使用1x1卷积来匹配尺寸。
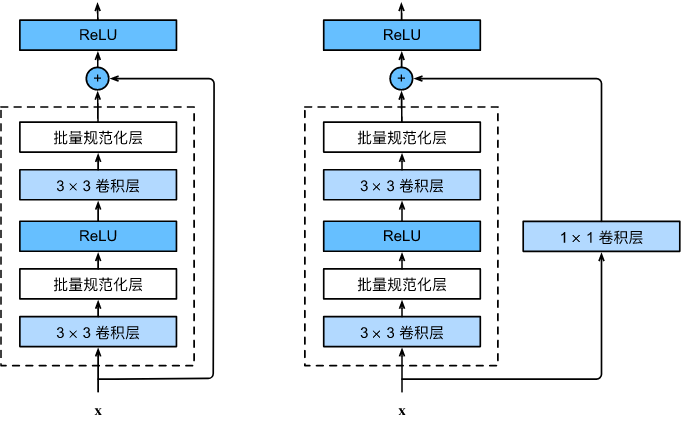
残差结构
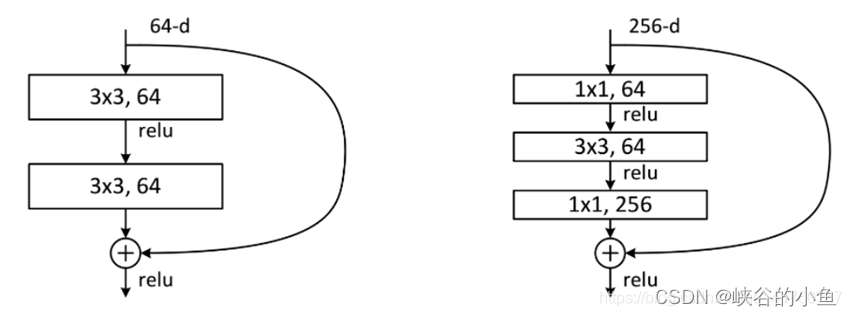
ResNet网络有两种残差块,一种是两个3x3卷积,一种是1x1,3x3,1x1三个卷积网络串联成残差模块。
PyTorch 实现:
class Residual_1(nn.Module):
r"""
18-layer, 34-layer 残差块
1. 使用了类似VGG的3×3卷积层设计;
2. 首先使用两个相同输出通道数的3×3卷积层,后接一个批量规范化和ReLU激活函数;
3. 加入跨过卷积层的通路,加到最后的ReLU激活函数前;
4. 如果要匹配卷积后的输出的尺寸和通道数,可以在加入的跨通路上使用1×1卷积;
"""
def __init__(self, input_channels, num_channels, use_1x1conv=False, strides=1):
r"""
parameters:
input_channels: 输入的通道上数
num_channels: 输出的通道数
use_1x1conv: 是否需要使用1x1卷积控制尺寸
stride: 第一个卷积的步长
"""
super().__init__()
# 3×3卷积,strides控制分辨率是否缩小
self.conv1 = nn.Conv2d(input_channels,
num_channels,
kernel_size=3,
padding=1,
stride=strides)
# 3×3卷积,不改变分辨率
self.conv2 = nn.Conv2d(num_channels,
num_channels,
kernel_size=3,
padding=1)
# 使用 1x1 卷积变换输入的分辨率和通道
if use_1x1conv:
self.conv3 = nn.Conv2d(input_channels,
num_channels,
kernel_size=1,
stride=strides)
else:
self.conv3 = None
# 批量规范化层
self.bn1 = nn.BatchNorm2d(num_channels)
self.bn2 = nn.BatchNorm2d(num_channels)
def forward(self, X):
Y = F.relu(self.bn1(self.conv1(X)))
Y = self.bn2(self.conv2(Y))
if self.conv3:
X = self.conv3(X)
# print(X.shape)
Y += X
return F.relu(Y)class Residual_2(nn.Module):
r"""
50-layer, 101-layer, 152-layer 残差块
1. 首先使用1x1卷积,ReLU激活函数;
2. 然后用3×3卷积层,在接一个批量规范化,ReLU激活函数;
3. 再接1x1卷积层;
4. 加入跨过卷积层的通路,加到最后的ReLU激活函数前;
5. 如果要匹配卷积后的输出的尺寸和通道数,可以在加入的跨通路上使用1×1卷积;
"""
def __init__(self, input_channels, num_channels, use_1x1conv=False, strides=1):
r"""
parameters:
input_channels: 输入的通道上数
num_channels: 输出的通道数
use_1x1conv: 是否需要使用1x1卷积控制尺寸
stride: 第一个卷积的步长
"""
super().__init__()
# 1×1卷积,strides控制分辨率是否缩小
self.conv1 = nn.Conv2d(input_channels,
num_channels,
kernel_size=1,
padding=1,
stride=strides)
# 3×3卷积,不改变分辨率
self.conv2 = nn.Conv2d(num_channels,
num_channels,
kernel_size=3,
padding=1)
# 1×1卷积,strides控制分辨率是否缩小
self.conv3 = nn.Conv2d(input_channels,
num_channels,
kernel_size=1,
padding=1)
# 使用 1x1 卷积变换输入的分辨率和通道
if use_1x1conv:
self.conv3 = nn.Conv2d(input_channels,
num_channels,
kernel_size=1,
stride=strides)
else:
self.conv3 = None
# 批量规范化层
self.bn1 = nn.BatchNorm2d(num_channels)
self.bn2 = nn.BatchNorm2d(num_channels)
def forward(self, X):
Y = F.relu(self.bn1(self.conv1(X)))
Y = F.relu(self.bn2(self.conv2(Y)))
Y = self.conv3(Y)
if self.conv3:
X = self.conv3(X)
# print(X.shape)
Y += X
return F.relu(Y)ResNet有不同的网络层数,比较常用的是50-layer,101-layer,152-layer。他们都是由上述的残差模块堆叠在一起实现的。
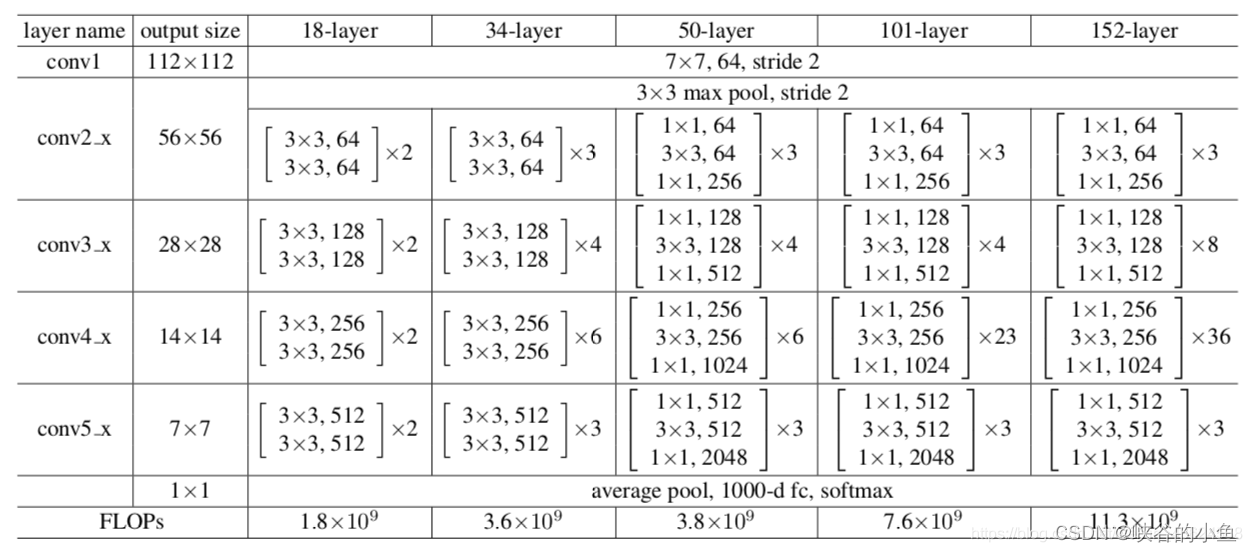
以18-layer为例,层数是指:首先,conv_1 的一层7x7卷积,然后conv_2~conv_5四个模块,每个模块两个残差块,每个残差块有两层的3x3卷积组成,共4×2×2=16层,最后是一层分类层(fc),加总一起共1+16+1=18层。
18-layer 实现
首先定义由残差结构组成的模块:
# ResNet模块
def resnet_block(input_channels, num_channels, num_residuals, first_block=False):
r"""残差块组成的模块"""
blk = []
for i in range(num_residuals):
if i == 0 and not first_block:
blk.append(Residual_1(input_channels,
num_channels,
use_1x1conv=True,
strides=2))
else:
blk.append(Residual_1(num_channels, num_channels))
return blk定义18-layer的最开始的层:
# ResNet的前两层:
# 1. 输出通道数64, 步幅为2的7x7卷积层
# 2. 步幅为2的3x3最大汇聚层
conv_1 = nn.Sequential(nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))定义残差组模块:
# ResNet模块 conv_2 = nn.Sequential(*resnet_block(64, 64, 2, first_block=True)) conv_3 = nn.Sequential(*resnet_block(64, 128, 2)) conv_4 = nn.Sequential(*resnet_block(128, 256, 2)) conv_5 = nn.Sequential(*resnet_block(256, 512, 2))
ResNet 18-layer模型:
net = nn.Sequential(conv_1, conv_2, conv_3, conv_4, conv_5,
nn.AdaptiveAvgPool2d((1, 1)),
nn.Flatten(),
nn.Linear(512, 10))
# 观察模型各层的输出尺寸
X = torch.rand(size=(1, 1, 224, 224))
for layer in net:
X = layer(X)
print(layer.__class__.__name__,'output shape:\t', X.shape)输出:
Sequential output shape: torch.Size([1, 64, 56, 56])
Sequential output shape: torch.Size([1, 64, 56, 56])
Sequential output shape: torch.Size([1, 128, 28, 28])
Sequential output shape: torch.Size([1, 256, 14, 14])
Sequential output shape: torch.Size([1, 512, 7, 7])
AdaptiveAvgPool2d output shape: torch.Size([1, 512, 1, 1])
Flatten output shape: torch.Size([1, 512])
Linear output shape: torch.Size([1, 10])
在数据集训练
def load_datasets_Cifar10(batch_size, resize=None):
trans = [transforms.ToTensor()]
if resize:
transform = trans.insert(0, transforms.Resize(resize))
trans = transforms.Compose(trans)
train_data = torchvision.datasets.CIFAR10(root="../data", train=True, transform=trans, download=True)
test_data = torchvision.datasets.CIFAR10(root="../data", train=False, transform=trans, download=True)
print("Cifar10 下载完成...")
return (torch.utils.data.DataLoader(train_data, batch_size, shuffle=True),
torch.utils.data.DataLoader(test_data, batch_size, shuffle=False))
def load_datasets_FashionMNIST(batch_size, resize=None):
trans = [transforms.ToTensor()]
if resize:
transform = trans.insert(0, transforms.Resize(resize))
trans = transforms.Compose(trans)
train_data = torchvision.datasets.FashionMNIST(root="../data", train=True, transform=trans, download=True)
test_data = torchvision.datasets.FashionMNIST(root="../data", train=False, transform=trans, download=True)
print("FashionMNIST 下载完成...")
return (torch.utils.data.DataLoader(train_data, batch_size, shuffle=True),
torch.utils.data.DataLoader(test_data, batch_size, shuffle=False))
def load_datasets(dataset, batch_size, resize):
if dataset == "Cifar10":
return load_datasets_Cifar10(batch_size, resize=resize)
else:
return load_datasets_FashionMNIST(batch_size, resize=resize)
train_iter, test_iter = load_datasets("", 128, 224) # Cifar10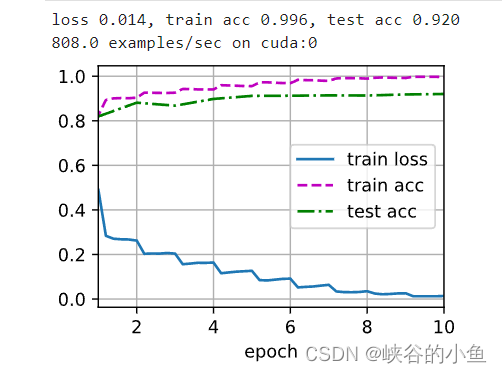
加载全部内容