C++版本基于ros将文件夹中的图像转换为bag包
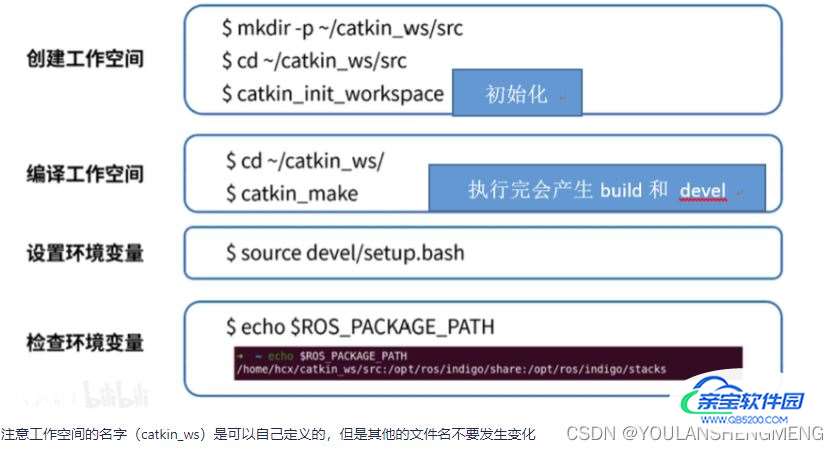
YOULANSHENGMENG 人气:0一、前期工作创建工作空间
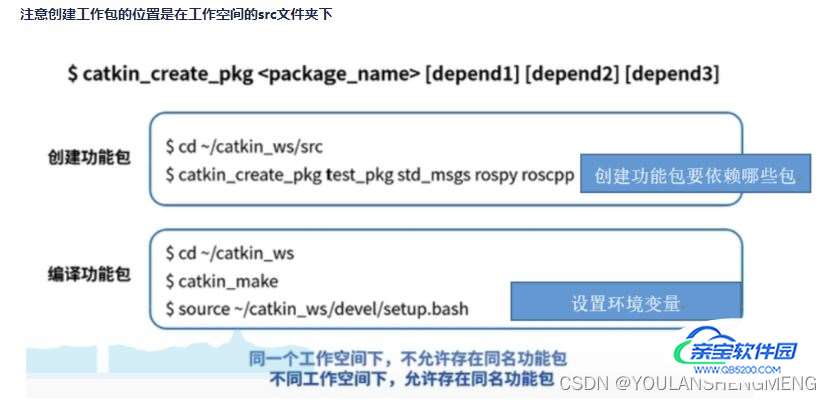
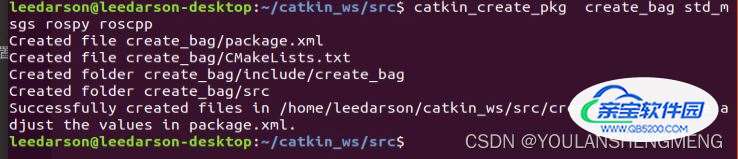
二、创建工作包
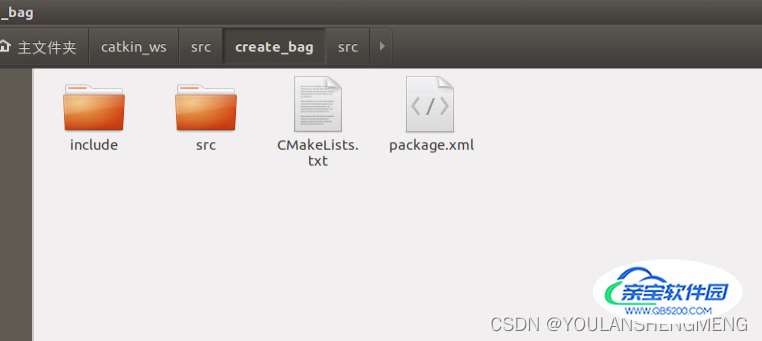
创建完成后,文件夹的格式为:
三、准备编译文件和代码
3.1 更换编译文件中的内容
将上图中的,CMakeLists.txt文件中的内容,替换为下面的内容
cmake_minimum_required(VERSION 3.0.2)
project(create_bag)
## Compile as C++11, supported in ROS Kinetic and newer
# add_compile_options(-std=c++11)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
# 寻找OpenCV库
find_package( OpenCV REQUIRED )
# 添加头文件
include_directories( ${OpenCV_INCLUDE_DIRS} )
find_package(catkin REQUIRED COMPONENTS
cv_bridge
rosbag
roscpp
rospy
std_msgs
)
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES imgtobag
# CATKIN_DEPENDS cv_bridge rosbag roscpp rospy std_msgs
# DEPENDS system_lib
)
###########
## Build ##
###########
## Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(
# include
${catkin_INCLUDE_DIRS}
${catkin_INCLUDE_DIRS}
${rosbag_INCLUDE_DIRS}
${OpenCV_INCLUDE_DIRS}
)
add_executable(node src/torosbag.cpp)
target_link_libraries(node
${catkin_LIBRARIES}
${PCL_LIBRARIES}
${rosbag_LIBRARIES}
${OpenCV_LIBS}
)
3.2 准备主程序
leedarson@leedarson-desktop:~/catkin_ws/src/create_bag/src$ touch torosbag.cpp
创建一个cpp的文件夹,cpp文件中的内容为:
#include <string>
#include <ros/console.h>
#include <rosbag/bag.h>
#include <cv_bridge/cv_bridge.h>
#include <iostream>
#include <vector>
#include <sys/types.h>
#include <dirent.h>
#include <unistd.h>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
using namespace std;
using namespace cv;
void GetFileNames(string path,vector<string>& filenames, string con);
void GetFileNamesByGlob(cv::String path,vector<cv::String>& filenames, string con);
bool read_images(string path, vector<string> &image_files);
int main(int argc, char **argv)
{
//输入文件和输出文件路径
string base_dir = "/home/leedarson/catkin_ws/src/create_bag/data/";
string img_dir = base_dir + "img/";
std::cout<<"image path is"<<img_dir<<std::endl;
string output_bag=base_dir +"Human2.bag";
string img_format = ".jpg";//格式
vector<string> img_names;
//GetFileNames(img_dir, img_names,".jpg");
read_images(img_dir, img_names);
cout<<"图片读取完成"<<endl;
cout<<"----"<<endl;
ros::Time::init();
rosbag::Bag bag;
bag.open(output_bag, rosbag::bagmode::Write);
int seq = 0;
vector<string>::iterator it;
for(it = img_names.begin(); it != img_names.end();it++)//todo 之后改成图片数量的多少
{
string tmp = *it;
std::cout<<"tmp path is"<<tmp<<std::endl;
//cout<<tmp<<endl;
//string strImgFile = img_dir + tmp + img_format;
string strImgFile = tmp;
usleep(200000);//4hz
ros::Time timestamp_ros = ros::Time::now();
// --- for image ---//
cv::Mat img = cv::imread(strImgFile);
if (img.empty())
cout<<"图片为空: "<<strImgFile<<endl;
cv_bridge::CvImage ros_image;
sensor_msgs::ImagePtr ros_image_msg;
ros_image.image = img;
ros_image.encoding = "bgr8";
//cout<<"debug_______"<<endl;
//ros::Time timestamp_ros2 = ros::Time::now();
ros_image_msg = ros_image.toImageMsg();
ros_image_msg->header.seq = seq;
ros_image_msg->header.stamp = timestamp_ros;
ros_image_msg->header.frame_id = "/image_raw";
bag.write("/camera/color/image_raw", ros_image_msg->header.stamp, ros_image_msg);
cout<<"write frame: "<<seq<<endl;
seq++;
}
cout<<"---end---"<<endl;
return 0;
}
//con:文件格式 form:文件命名形式
void GetFileNames(string path,vector<string>& filenames, string con)
{
DIR *pDir;
struct dirent* ptr;
string filename, format, name, name2;
if(!(pDir = opendir(path.c_str())))
return;
int num=0;
while((ptr = readdir(pDir))!=0)
{
//跳过.和..文件
if(strcmp(ptr->d_name, ".") == 0 || strcmp(ptr->d_name, "..") == 0)
continue;
filename = ptr->d_name;
format = filename.substr(filename.find("."), filename.length());
//name = filename.substr(0, filename.find("."));
name = filename.substr(0, filename.find("."));
cout<<filename<<"\t"<<name<<"\t"<<format<<endl;
if(format == con)//也可以添加对文件名的要求
{
filenames.push_back(name);
num++;
}
}
std::cout<<"file size of:"<<filenames.size()<<"****"<<num<<std::endl;
closedir(pDir);
}
//cv::glob(路径,要放置路径下文件定义的容器,false)
/*find_first_of()和find_last_of()
执行简单的模式匹配,如在字符串中查找单个字符c:函数find_first_of() 查找在字符串中第1个出现的字符c,而函数find_last_of()查找最后一个出现的c。匹配的位置是返回值。如果没有匹配发生,则函数返回-1*/
//复制子字符串substr(所需的子字符串的起始位置,默认值为0 , 复制的字符数目)返回值:一个子字符串,从其指定的位置开始
//按图片名升序排列
bool read_images(string path, vector<string> &image_files)
{
//fn存储path目录下所有文件的路径名称,如../images/0001.png
vector<cv::String> fn;
cv::glob(path, fn, false);
size_t count_1 = fn.size();
if (count_1 == 0)
{
cout << "file " << path << " not exits"<<endl;
return -1;
}
//v1用来存储只剩数字的字符串
vector<string> v1;
for (int i = 0; i < count_1; ++i)
{
//cout << fn[i] << endl;
//1.获取不带路径的文件名,000001.jpg(获取最后一个/后面的字符串)
string::size_type iPos = fn[i].find_last_of('/') + 1;
string filename = fn[i].substr(iPos, fn[i].length() - iPos);
//cout << filename << endl;
//2.获取不带后缀的文件名,000001
string name = filename.substr(0, filename.rfind("."));
//cout << name << endl;
v1.push_back(name);
}
//把v1升序排列
sort(v1.begin(), v1.end(),[](string a, string b) {return stoi(a) < stoi(b); });
string v = ".jpg";
size_t count_2 = v1.size();
for(int j = 0; j < count_2; ++j)
{
string z = path + v1[j] + v;
image_files.push_back(z);//把完整的图片名写回来
}
return true;
}
四、编译及执行
4.1 编译

4.2 执行
1,首先打开一个终端,输入roscore,启动ros
2,打开新的终端,进入工作空间,执行以下语句
leedarson@leedarson-desktop:~/catkin_ws$ source devel/setup.bash
leedarson@leedarson-desktop:~/catkin_ws$ rosrun create_bag node
通过以上操作就可以将文件夹中的图像转换为bag包。
4.3 检测录制的bag包的话题和信息
rostopic list
rostopic echo
加载全部内容